A Closed-Form Control for Safety Under Input Constraints Using a Composition of Control Barrier Functions
IEEE Open Journal of Control Systems, 2024
Under Review
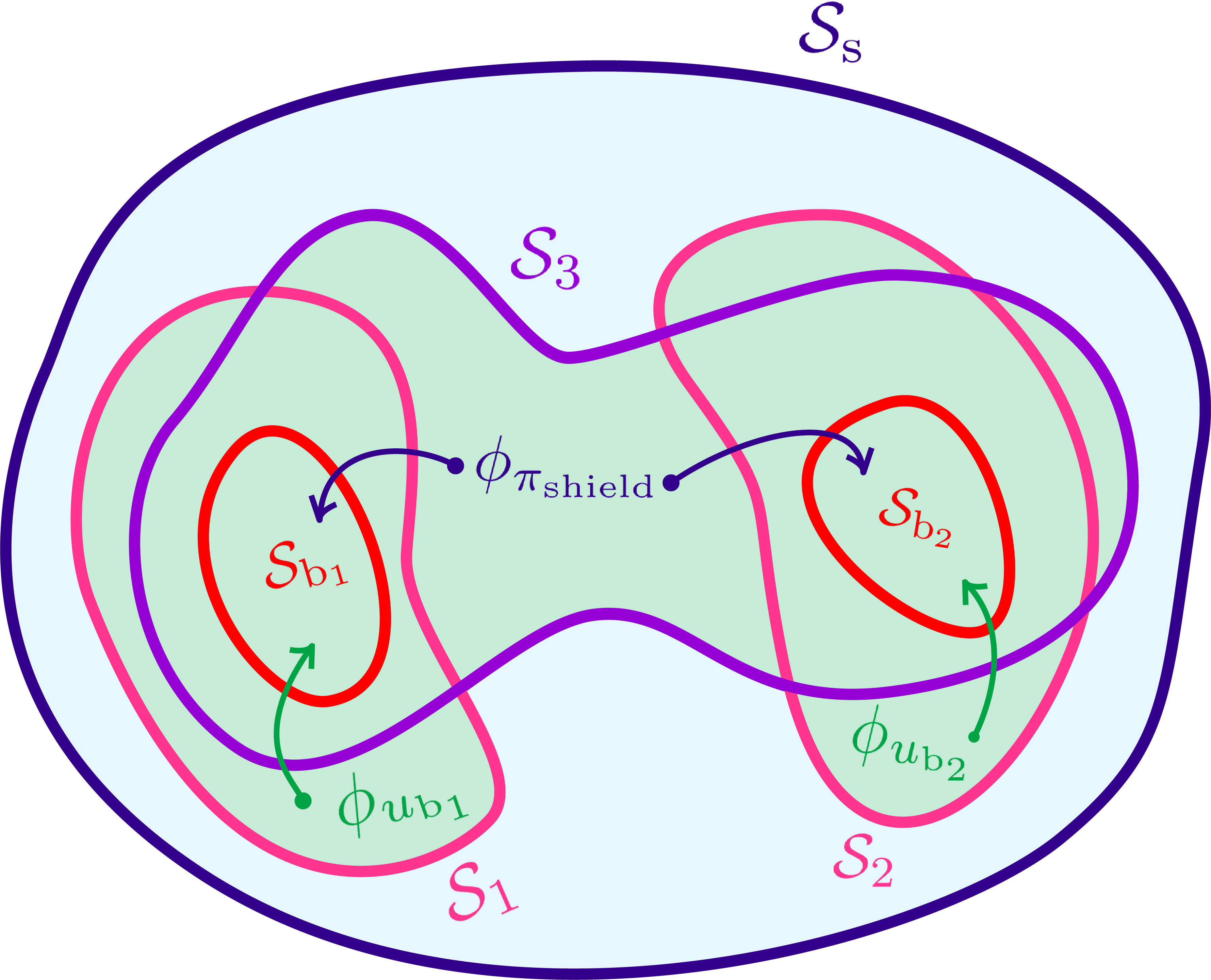
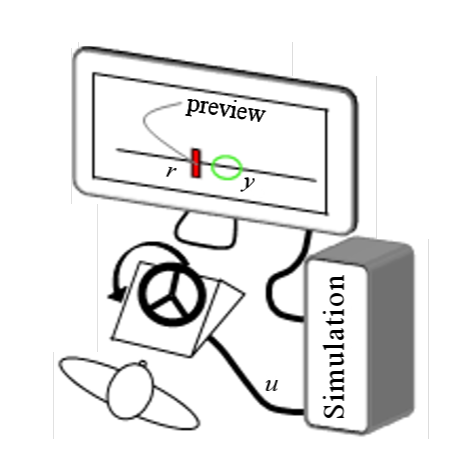
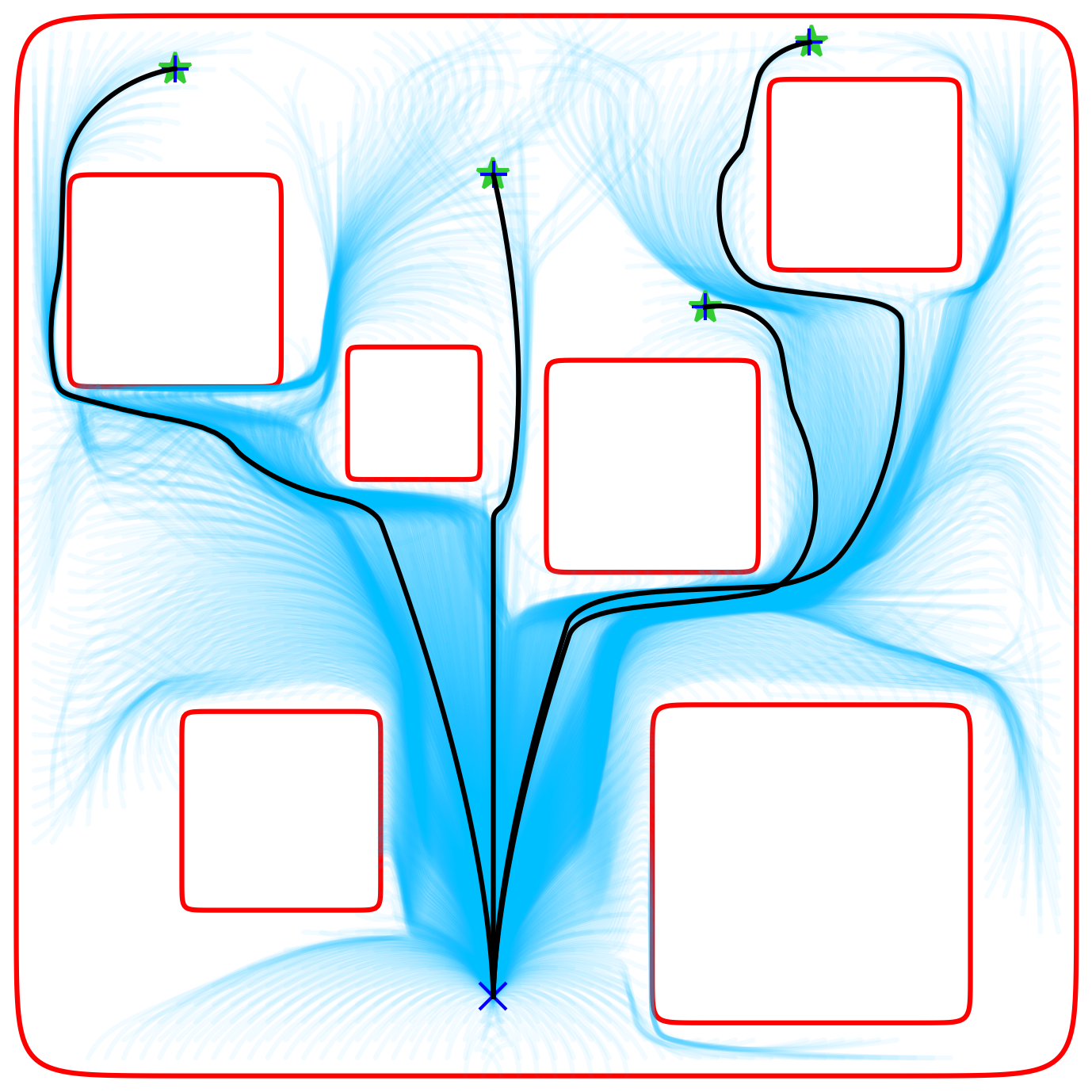
Composing multiple state and input constraints of differing relative degrees into a single control barrier function (CBF) using a composite soft-minimum approach. Achieves safe control with a closed-form solution, eliminating online optimization for exceptional efficiency.